ESERCIZIO 4.1 In termini della matrice compagna  dell'equazione, il problemi hanno soluzione
dell'equazione, il problemi hanno soluzione
- Calcolando la forma canonica di , risulta
quindi la successione di Fibonacci è calcolabile con
- Gli autovalori
 di
di
sono complessi, e la forma canonica di è la rappresentazione matriciale di  rispetto alla base costituita da parte reale e parte immaginaria di un autovettore di
rispetto alla base costituita da parte reale e parte immaginaria di un autovettore di  :
:
Allora
e le orbite non sono in genere limitate.
- La molteplicità algebrica dell'unico autovalore
 di è 2, mentre l'autospazio ha dimensione 1, generato da
di è 2, mentre l'autospazio ha dimensione 1, generato da  . La forma canonica è
. La forma canonica è
Per
![$N=\left[\begin{array}{cc}{0}&{1}\\
{0}&{0}\end{array}\right]$](img2814.png) si calcola
si calcola
 , ovvero
, ovvero
Le orbite sono "rettilinee" se  : i punti della bisettrice sono punti fissi della mappa.
: i punti della bisettrice sono punti fissi della mappa.
ESERCIZIO 4.2 La matrice del sistema dinamico continuo e la matrice  del sistema dinamico discretizzato con il metodo di Eulero sono
del sistema dinamico discretizzato con il metodo di Eulero sono
con autovalori  e
e
 , rispettivamente. Gli autospazi coincidono, cioè
, rispettivamente. Gli autospazi coincidono, cioè  è autovettore di autovalore
è autovettore di autovalore  per e di autovalore
per e di autovalore  per ;
per ;  è autovettore di autovalore
è autovettore di autovalore  per e di autovalore
per e di autovalore  per . Quindi le condizioni iniziali parallele a
per . Quindi le condizioni iniziali parallele a  hanno limite
hanno limite  per
per  , tutte le altre tendono all'infinito, sia nel sistema continuo che in quello discreto.
, tutte le altre tendono all'infinito, sia nel sistema continuo che in quello discreto.
ESERCIZIO 4.3 Il sistema dinamico discreto è:
con gli autovalori di :
che sono gli inversi di quelli che si ottengono con le differenze in avanti. Perciò le soluzioni del sistema discretizzato decrescono come
 e tendono a 0 per
e tendono a 0 per  .
.
PROBLEMA 4.4
Figura C.4:
Alcune orbite della mappa standard del problema dei due corpi. La curva di livello zero dell'energia ha proprietà analoghe a quelle di una separatrice.
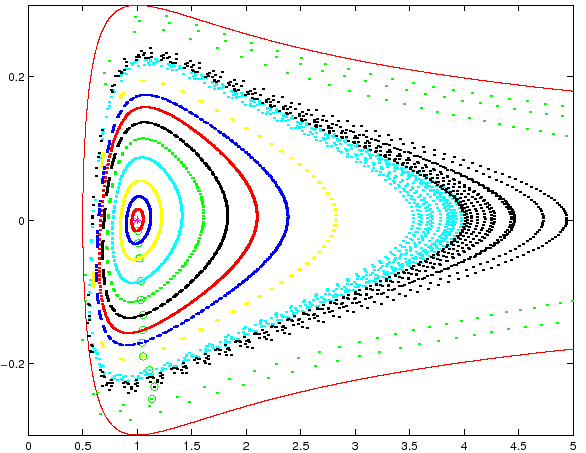 |
La mappa standard
ha il solo punto fisso
 corrispondente al punto di equilibrio stabile (orbita circolare) del sistema continuo. A titolo di esempio, la Figura C.4 mostra il comportamento di alcune orbite per
corrispondente al punto di equilibrio stabile (orbita circolare) del sistema continuo. A titolo di esempio, la Figura C.4 mostra il comportamento di alcune orbite per  . La curva continua è la curva di livello
. La curva continua è la curva di livello  .
.
ESERCIZIO 4.5 L'equazione alle differenze finite del secondo ordine
si riduce ad un sistema dinamico discreto usando, per esempio,
 :
:
da cui
che ha come punti fissi  e
e  , coincidenti con i punti di equilibrio del sistema discreto. Il punto è un pozzo per il sistema continuo, asintoticamente stabile anche per il sistema discreto per
, coincidenti con i punti di equilibrio del sistema discreto. Il punto è un pozzo per il sistema continuo, asintoticamente stabile anche per il sistema discreto per  abbastanza piccolo (si calcoli il polinomio caratteristico in
abbastanza piccolo (si calcoli il polinomio caratteristico in  e in
e in  ). Il punto ha per il sistema continuo un linearizzato degenere, e dallo studio delle curve di livello (localmente come nella Figura 3.2) si deduce che è instabile. Nel sistema discreto il linearizzato in ha matrice
). Il punto ha per il sistema continuo un linearizzato degenere, e dallo studio delle curve di livello (localmente come nella Figura 3.2) si deduce che è instabile. Nel sistema discreto il linearizzato in ha matrice
con autovalori
 . perciò la mappa linearizzata è stabile, non asintoticamente stabile in questo punto. Dunque per quanto piccolo sia non conosciamo, almeno con gli strumenti studiati in questo corso, le proprietà di stabilità in del sistema discreto e non possiamo rispondere alla domanda.
. perciò la mappa linearizzata è stabile, non asintoticamente stabile in questo punto. Dunque per quanto piccolo sia non conosciamo, almeno con gli strumenti studiati in questo corso, le proprietà di stabilità in del sistema discreto e non possiamo rispondere alla domanda.
ESERCIZIO 4.6 Se  allora
allora  ,
,
 . Da
. Da  si deduce
si deduce
da cui  ,
,  .
.
ESERCIZIO 4.7 I seguenti programmi sono scritti seguendo la sintassi del linguaggio Matlab.
a) Il più semplice programma per eseguire esperimenti sulla mappa standard: stmap1.m . Uso: dare hold off per inizializzare la figura, e assegnare ; per ogni orbita, assegnare le condizioni  e il numero di iterate
e il numero di iterate  e quindi eseguire stmap1.
e quindi eseguire stmap1.
b) Un semplice programma per il metodo simplettico a tre scorrimenti, sempre applicato alla discretizzazione del pendolo nonlineare: symp2.m . Uso: come sopra.
c) Idem per il metodo di Runge-Kutta implicito ad un passo intermedio: rkimp2.m .
d) Idem per il metodo di Runge-Kutta classico: rk4.m .
Andrea Milani
2009-06-01
![\begin{displaymath}\left[\begin{array}{c}{x_k}\\
{x_{k+1}}\end{array}\right]=A^k\,\left[\begin{array}{c}{x_0}\\
{x_1}\end{array}\right]\;. \end{displaymath}](img2798.png)
![\begin{displaymath}A^k={\left[\begin{array}{cc}{0}&{1}\\
{1}&{1}\end{array}\ri...
...\sqrt5)/2]^k}&{0}\\
{0}&{[(1-\sqrt5)/2]^k}\end{array}\right] \end{displaymath}](img2799.png)
![\begin{displaymath}V=\left[\begin{array}{cc}{2}&{2}\\
{1+\sqrt5}&{1-\sqrt5}\en...
...y}{cc}{\sqrt5-1}&{2}\\
{\sqrt5+1}&{-2}\end{array}\right] \;; \end{displaymath}](img2800.png)
![\begin{displaymath}x_{k+1}=\frac{\sqrt5}5\left [\left ( \frac{1+\sqrt5}2\right )^{k+2} -\left (\frac{1-\sqrt5}2\right )^{k+2} \right ]\;. \end{displaymath}](img2801.png)
![\begin{displaymath}A=\left[\begin{array}{cc}{0}&{1}\\
{-4}&{2}\end{array}\right] \end{displaymath}](img2803.png)
![\begin{displaymath}\tilde A=\left[\begin{array}{cc}{1}&{-\sqrt3}\\
{\sqrt3}&{1...
...ay}{cc}{1}&{0}\\
{1/\sqrt3}&{-1/\sqrt3}\end{array}\right]\;, \end{displaymath}](img2807.png)
![\begin{displaymath}\left[\begin{array}{c}{x_k}\\
{x_{k+1}}\end{array}\right]=V...
...\cos[(k-1)\pi/3]}\\
{\sin[(k-1)\pi/3]}\end{array}\right] \;, \end{displaymath}](img2809.png)
![\begin{displaymath}A=\left[\begin{array}{cc}{0}&{1}\\
{-1}&{2}\end{array}\right]=V\,\tilde A\, V^{-1}\;, \end{displaymath}](img2812.png)
![\begin{displaymath}\tilde A=\left[\begin{array}{cc}{1}&{1}\\
{0}&{1}\end{array...
...eft[\begin{array}{cc}{1}&{0}\\
{-1}&{1}\end{array}\right]\;. \end{displaymath}](img2813.png)
![\begin{displaymath}\left[\begin{array}{c}{x_k}\\
{x_{k+1}}\end{array}\right]=V...
...t] +\left[\begin{array}{c}{x_0}\\
{x_1}\end{array}\right]\;. \end{displaymath}](img2816.png)
![\begin{displaymath}A=\left[\begin{array}{cc}{0}&{\omega}\\
{\omega}&{0}\end{ar...
...rray}{cc}{1}&{h\,\omega}\\
{h\,\omega}&{1}\end{array}\right] \end{displaymath}](img2819.png)
![\begin{displaymath}\left[\begin{array}{c}{x_{k-1}}\\
{x_k}\end{array}\right]=A...
...{-1/(1+\omega^2\,h^2)}&{2/(1+\omega^2\,h^2)}\end{array}\right] \end{displaymath}](img2827.png)
![\begin{displaymath}
\left\{\begin{array}{lcl}
{\displaystyle x_{k+1}} & {\displ...
...\,\gamma) +h^2\, \left[x_k^2-x_k^3\right]}
\end{array}\right. \end{displaymath}](img2837.png)
![\begin{displaymath}A=\left[\begin{array}{cc}{1}&{1-h\,\gamma}\\
{0}&{1-h\,\gamma}\end{array}\right] \end{displaymath}](img2838.png)